

前言
自從iPhone7 PLUS推出了2倍光學變焦的雙攝方案,拉開了計算光學創(chuàng)新的序幕,OPPO不甘落后最近推出了潛望式的5倍光學變焦方案,計算光學在手機上一直作為創(chuàng)新的重頭戲呈現(xiàn)給廣大消費者。最近關(guān)于iPhone8要推3D成像的傳聞,讓整個手機業(yè)界都為之歡呼雀躍,似乎看到了新的機遇,普遍認為這是2D成像通往3D成像的一次重大變革。因為工作需要,對3D成像進行了一次深度的調(diào)研,跟大家探討下,3D成像在手機上的應(yīng)用到底是雞肋還是一次行業(yè)創(chuàng)新,對此業(yè)界持有不同意見。
1.什么是3D成像。
3D成像就是在二維圖像,包括顏色,亮度,細節(jié)的基礎(chǔ)上增加了景深的信息,在拍照的同時,獲取對象的景深數(shù)據(jù),應(yīng)用于人臉識別,虹膜識別,手勢控制,機器視覺,計算攝影。3D成像方案包括了結(jié)構(gòu)光,TOF和雙目。
2.是什么驅(qū)動力推動結(jié)構(gòu)光方案能在手機3D成像技術(shù)取得重大突破,成為蘋果新機的標配。
2.1芯片技術(shù)的創(chuàng)新,讓結(jié)構(gòu)光方案落地到手機應(yīng)用。
蘋果收購了PrimeSense,從經(jīng)驗積累到實際應(yīng)用,方案成熟度當屬最高,特別是在手機上的應(yīng)用。PrimeSense有一顆獨立的PS1080景深算法芯片,用在蘋果上的型號有待確認和解開。芯片除了能高效的處理3D景深算法,也為降低手機功耗起到舉足輕重的作用,因為3D人臉檢測通過外部ASIC處理,只需要很小的功耗,在數(shù)十微秒內(nèi)即可完成拍照,景深數(shù)據(jù)采集,而不用每次主芯片去跑CPU、GPU和DSP,即高效又環(huán)保,因為省電。國內(nèi)方案商奧比中光是結(jié)構(gòu)光領(lǐng)域的實力派,其三月底的結(jié)構(gòu)光生態(tài)伙伴發(fā)布會將有軟件合作商虹軟,模組合作商丘鈦以及投資方MTK等幾家業(yè)界實力玩家站臺。奧比中光的算法跑在自己研發(fā)的一顆型號為MX400的ASIC上,從應(yīng)用和效果上經(jīng)過了實際的批量檢驗。公司自2013年成立到現(xiàn)在,短短幾年即取得了不錯的成績。預(yù)計今年,奧比中光也會有適合在手機應(yīng)用的ASIC和整體方案呈現(xiàn)給手機廠商。

2.2先進的模組制造技術(shù)進一步推動3D成像產(chǎn)業(yè)化。
模組供應(yīng)商舜宇,歐菲,丘鈦在3D成像變革中將會受益。IR攝像頭和RGB攝像頭采用AA共基板模組結(jié)構(gòu),丘鈦在雙攝模組制程上有多項技術(shù)創(chuàng)新,經(jīng)驗豐富,特別是后段測試自動化工位,大大提高生產(chǎn)效率,保證了出廠的每一只模組都在一致的標準下經(jīng)過嚴格測試。丘鈦擁有國內(nèi)主流客戶群,成為了3D方案商和手機廠商的香餑餑,相信在這一波3D成像技術(shù)升級中會脫穎而出,最近宣布將并購和控股一家鏡頭供應(yīng)商NEWMAX,而NEWMAX是主流3D相機的紅外鏡頭零部件供應(yīng)商,在光學設(shè)計和鍍膜技術(shù)上技術(shù)領(lǐng)先,丘鈦的這筆投資可謂未雨綢繆,長遠看將給丘鈦在光學技術(shù)創(chuàng)新上會注入更多的動力。
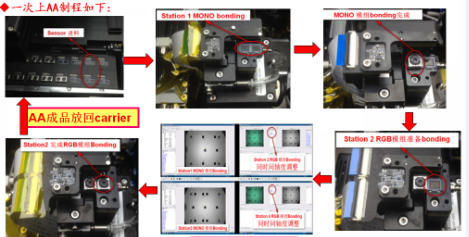
圖2.1 丘鈦的雙攝模組全自動化AA制程
2.3結(jié)構(gòu)光Projector核心部件的創(chuàng)新推動了器件微型化,得以應(yīng)用到手機設(shè)計中。
下圖為Kinect紅外激光投射器的原理圖。根據(jù)PrimeSense在專利中的描述,紅外激光生成器(42)射出準直后的激光束(44),通過光學衍射元件(DOE)進行散射,進而得到所需的散斑圖案。

圖2.2 Kinect紅外激光投射器原理圖
2.3.1 Projector采用VCSEL(垂直腔面激光發(fā)射器)。
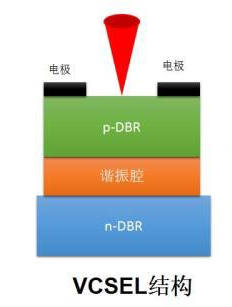
圖2.3 VCSEL(垂直腔面激光發(fā)射器)
VCSEL具有以下特點:

特點一:光束窄且圓 VCSEL耦合效率高

特點二:閾值電流低 VCSEL低功耗

特點三:易集成

特點四:VCSEL可以直接在wafer上完成工藝制作與測試 低成本
VCSEL受益的供應(yīng)商:
LITE.O、II-VI.O、FNSR.O是主要的VCSEL供應(yīng)商,Winsemi擁有VCSEL晶圓制程。
2.3.2 準直鏡頭WLO(Wafer-level Optics)大部分專利掌握在Heptagon手中,Heptagon被收購后應(yīng)該要改名為AMS。
準直鏡頭一般由兩組鏡片組成,第一組鏡片先把激光壓縮成散角較小的光束,經(jīng)過第二組凸透鏡使得在象空間的光束為軸對稱的園柱形平行光束。

圖3.1 半導(dǎo)體準直激光鏡頭

圖3.2準直鏡頭的光路
Heptagon WLO技術(shù)有以下特點:
a.按準確數(shù)量對例如雙鏡頭和三鏡頭等光學系統(tǒng)中分離出單面光學晶圓或者把雙面光學晶圓互相分離出來。
b.按準確數(shù)量把光學系統(tǒng)從傳感器或者光源分離出來。
c.Heptagon 為隔片開發(fā)了復(fù)制技術(shù),使得像玻璃一樣的聚合物隔片的成本更低也更結(jié)實。

Heptagon的WLO鏡頭模組4P結(jié)構(gòu)。

圖3.3 WLO鏡頭模組架構(gòu)圖
2.3.3 光學衍射元件DOE(Diffractive Optical Elements)
.png)
圖4.1 DOEs - Diffractive Optics
DOE由擴散片(Diffuser)和光柵片(Raster)組成,擴散片作用是將激光光束散射成不規(guī)則分布的點狀散斑圖案,由于擴散片對于光束進行散射的角度(FOV)有限,所以需要光柵(見下圖)將散斑圖案進行衍射“復(fù)制”后,擴大其投射角度。這種“復(fù)制”效果被稱為光學卷積,從下圖的原理圖中我們看到,當光束通過擴散片(如毛玻璃)后產(chǎn)生的散斑,再經(jīng)過光柵后進行卷積就能得到所需透射角度的散斑。
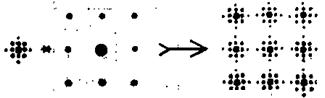
圖4.2 散斑擴散圖
DOE衍射元件供應(yīng)商:HOLOOR,馭光科技,水晶光電
3 什么原因?qū)е耇OF沒能趕上這一波的3D成像技術(shù)升級?
TOF相對于結(jié)構(gòu)光方案,精度高,可以達到mm級別,處理速度快,可以同時捕捉整幅畫面的深度信息。但是在實際應(yīng)用中也存在以下問題尚待解決。
3.1 核心器件圖像傳感器是3D成像的關(guān)鍵,而傳感器的供應(yīng)鏈影響了技術(shù)的落地。
結(jié)構(gòu)光用的紅外CMOS傳感器,主流的廠家三星,OV,Onsemi,國內(nèi)廠家格科微,產(chǎn)品線豐富,大Pixel,小尺寸,高動態(tài),各大平臺也有驅(qū)動的適配,制程經(jīng)過手機行業(yè)大規(guī)模制造和批量出貨檢驗。而TOF Sensor產(chǎn)品線不夠豐富,TOF Sensor主流供應(yīng)商集中在STM,TI,AMS。在這里特別提一下AMS,剛剛在過去不久的2月份,花了接近6億美金,收購了WLO 供應(yīng)商Heptagon 100%的股份。同時也看到一些廠家,如比利時Melexis擁有TOF Sensor,通過技術(shù)創(chuàng)新來分一杯羹。

圖5 Melexis的TOF應(yīng)用架構(gòu)圖
3.2 圖像傳感器Sensor的分辨率和尺寸,制約TOF在手機的應(yīng)用。
前面提到,手機紅外CMOS的產(chǎn)品線較豐富,選擇性較多,能滿足3D人臉識別,自拍背景虛化等這些應(yīng)用。而TOF則選擇性小很多,目前我找到的分辨率最高的是Melexis的一顆QVGA的Sensor,QVGA是什么概念,就是320240分辨率,大家如果有更好的也可以給我推薦。制約TOF 分辨率上不去的原因,據(jù)調(diào)研跟功耗有一定關(guān)系,分辨率越高,功耗越大。另外Sensor的尺寸也制約了在手機上的應(yīng)用,因為這顆Sensor除了感知紅外圖像信息,還有特別的單元來記錄光的相位信息,那么這樣一顆1/3” QVGA的Sensor,到底有多大?4.8x3.6mm,這只是傳感器的感光面積的尺寸,而封裝片的尺寸則是6.5x5.5mm。一顆普通的1/7.5” VGA手機紅外CMOS OV7251 COB封裝的尺寸是3.9x3.4mm,懸殊太大。
3.3結(jié)構(gòu)光和TOF方案因為有光投射和接收的過程,稱之為主動式3D成像,很容易受到自然光線的影響和干擾。

圖6 TOF原理
要解決這個問題,可以把發(fā)射端功率加大,這個道理很容易理解,但是這會影響到手機的功率,影像手機的待機時間。結(jié)構(gòu)光受環(huán)境光線影響要小于TOF,因為結(jié)構(gòu)光是通過Projector投射紅外圖案,而圖案是一直存在于物體表面,Sensor可以通過延長快門時間來捕捉足夠清晰的圖案,而TOF是通過調(diào)制的高頻脈沖來計算光飛行時間的,要讓Sensor在這么短時間能夠捕捉足夠的光信息,那么就要把Sensor的Pixel size也就是單個像素的感光面積做得足夠大,以前面提到的Melexis的這顆QVGA為例,15x15um的Pixel size,手機1/2.3” CMOS的1200萬像素的感光面積也就只有1.5x1.5um。因此芯片的功耗隨之增大,芯片的面積自然也要比一般的相同分辨率的手機CMOS大很多,而要把芯片做到足夠小,分辨率足夠高,應(yīng)用在手機上,現(xiàn)在是有相當難度的,這個問題也許以后隨著制程的提升,能夠獲得解決。
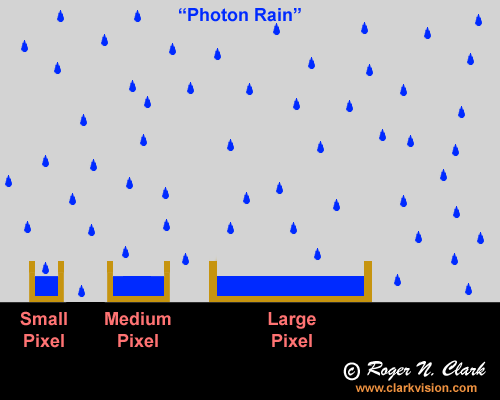
圖7 Large Pixel能夠在同一時間接收更多的光線
4.3D成像在手機上的應(yīng)用有哪些?是技術(shù)創(chuàng)新還是雞肋?
4.1傳言iPhone8會上3D成像,用在前攝做3D人臉檢測,配合虹膜識別,進行解鎖功能,搭配G-sensor和GYRO,實現(xiàn)用戶行為檢測快速解鎖功能,這將提升用戶體驗,因為指紋解鎖的時間可以長達一秒,而且經(jīng)常受到汗水和手指狀態(tài)的影響而導(dǎo)致失敗,但是3D人臉識別可以在0.03秒內(nèi)完成。同時手機去掉指紋模塊以提升屏占比,讓手機ID做得更漂亮,可以突破更多的局限。
4.2因為3D攝像頭提供了景深數(shù)據(jù),配合算法就可以實現(xiàn)背景虛化功能,虹軟和WestAlgo都有此類算法。因為是主動式景深探測,對于無紋理的景物,景深提取會更準確。
4.3另外一個應(yīng)用是人臉補光,因為人臉的深度信息可以做到很精確,那么就可以對特定的人臉范圍進行補光,對陰陽臉進行光線補救。
4.4除了以上應(yīng)用,3D當然也可以開發(fā)游戲應(yīng)用,手勢控制。
4.5.觀點
1)前攝結(jié)構(gòu)光3D成像方案隨著iPhone8的謎底解開,將會成為手機應(yīng)用的主流方案,TOF方案受限于各種因素,還無法落地到手機應(yīng)用,也沒有看到TOF Sensor供應(yīng)商在手機應(yīng)用的推薦,而多應(yīng)用于Automotive, Robot, Toy。
2)3D成像在手機上以前攝為主,有多項接地氣的應(yīng)用,對于用戶體驗提升很有價值。后攝的應(yīng)用較少,除了SLAM的應(yīng)用,對于拍照的景深提取,因為受到環(huán)境影響,不具備可用性。
3)雙攝方案會是手機主攝像頭的3D成像的主流,通過雙攝獲取景深信息,實現(xiàn)背景虛化,Super Light,Super Pixel等功能。
4)業(yè)界都在等待iPhone8的發(fā)布,前期通過技術(shù)積累,以便迅速跟進。專利風險和成熟度需要評估。
5)一直以來,無論是結(jié)構(gòu)光還是TOF這兩種3D成像技術(shù)都和Kinect,RealSense,Project Tango這些關(guān)鍵詞相匹配,行業(yè)應(yīng)用包括體感操控,3D掃描,機器人,玩具,Automotive等等。直到聯(lián)想PHAB2 Pro Tango在移動終端上作了一次AR應(yīng)用探索。三維重建作為連接真實物理世界和虛擬世界的最重要感知計算通道,前途自然是星辰大海,但和所有偉大的技術(shù)一樣,需要的不但有資本的堆積和市場的培育,更加需要的是時間和耐心。在這條馬拉松的跑道上,唯有堅信篤定的選手,才可以跑到最后,摘取AI和AR的果實。
圖片引用了各大媒體的發(fā)布的資料,在此表示感謝。






 01月07日 18:14
01月07日 18:14